-
 Thiết Bị STEM
Thiết Bị STEM
-
Sáng Tạo - Nghệ Thuật
-
Đồ Chơi - Công Nghệ
-
Mô Phỏng Nghề Nghiệp
-
Robotic Frames
-
Mạch Lập Trình
-
Module - Mạch Cảm Biến
- Chi tiết danh mục
-
Combo Cảm Biến
-
Cảm Biến Vân Tay
-
Cảm Biến Gyro Gia Tốc
-
Cảm Biến La bàn
-
Cảm Biến Áp Suất
-
Cảm Biến Độ Ẩm - Nhiệt Độ
-
Cảm Biến Nước - Mưa
-
Cảm Biến Ánh Sáng
-
Cảm Biến Âm Thanh
-
Cảm Biến Touch
-
Cảm Biến Trọng Lượng
- Cảm Biến Lưu Lượng
-
Cảm Biến Từ - Kim Loại
-
Cảm Biến Đếm - Encoder
-
Cảm Biến Vị Trí - Định Vị
-
Cảm Biến Khí - Môi Trường
-
Cảm Biến Điện Áp - Dòng Điện
-
Cảm Biến Chuyển Động - Rung
-
Cảm Biến Khoảng Cách - Vật Cản
-
Module - Mạch Điện Tử
- Chi tiết danh mục
- LCD Màn Hình Hiển Thị
- LED - Matrix Hiển Thị
- Đồng Hồ Đo - Hiển Thị
- Mạch Nguồn - Điều Chỉnh
- Mạch Relay - Đóng Ngắt
- Mạch Điều Khiển Động Cơ
- Mạch Nạp Dữ Liệu Chip
- Mạch Truyền - Nhận Tín Hiệu
- Mạch Chuyển Đổi Dữ Liệu
- Truyền Nhận - Âm Thanh
- Van Điện - Công Tắc Điện
-
Phím Bấm - Keypads
-
Mạch Đệm - Cách Ly Tín Hiệu
-
Mạch Khuếch Đại Tín Hiệu
-
Dụng Cụ Hàn Cell - Đóng Pin
-
Linh Kiện DIY - Theo Project
-
Thiết Bị - Nội Thất Maker Place
Cảm Biến Hall MLX90393









Thông Tin Sản Phẩm
Mô tả sản phẩm
Cảm Biến Hall MLX90393 là loại cảm biến hall 3D siêu nhỏ và đa năng .Cảm biến này sử dụng nguyên lý Hall Effect để đo từ trường và có khả năng đo từ trường ở ba chiều. Nó cung cấp độ chính xác cao và độ phân giải cao trong một thiết kế nhỏ gọn và tiết kiệm năng lượng.
Cảm biến Hall MLX90393 được ứng dụng rộng rãi trong các ứng dụng công nghiệp và điện tử, bao gồm đo vị trí và chuyển động trong xe hơi, máy bay, robot và thiết bị y tế. Nó cũng được sử dụng để đo lường và điều khiển các bộ điều khiển động cơ và các ứng dụng liên quan đến đo lường áp suất và dòng điện, được sử dụng trong các ứng dụng dịch chuyển tuyến tính, xoay góc và phát hiện vị trí 3D như kính VR, máy bay điều khiển, robot điều khiển, game giả lập thực tế...vv
Ví dụ, trong xe hơi, cảm biến Hall MLX90393 được sử dụng để đo vị trí cửa xe, vị trí chân ga và phanh, đo tốc độ, vị trí bánh xe và hệ thống lái. Trong máy bay, nó được sử dụng để đo lường áp suất khí quyển, vận tốc và độ cao. Trong robot, nó có thể được sử dụng để đo vị trí, tốc độ và chuyển động.
Cảm biến Hall MLX90393 cung cấp một giải pháp đo lường chính xác và đáng tin cậy cho nhiều ứng dụng khác nhau, đặc biệt là trong các ứng dụng yêu cầu độ chính xác cao và độ tin cậy cao.
Thông số kỹ thuật
- Nguyên lý hoạt động: Nguyên lý Hall Effect
- Điện áp hoạt động: từ 2.7V đến 5.5V
- Dòng điện tiêu thụ: 400μA
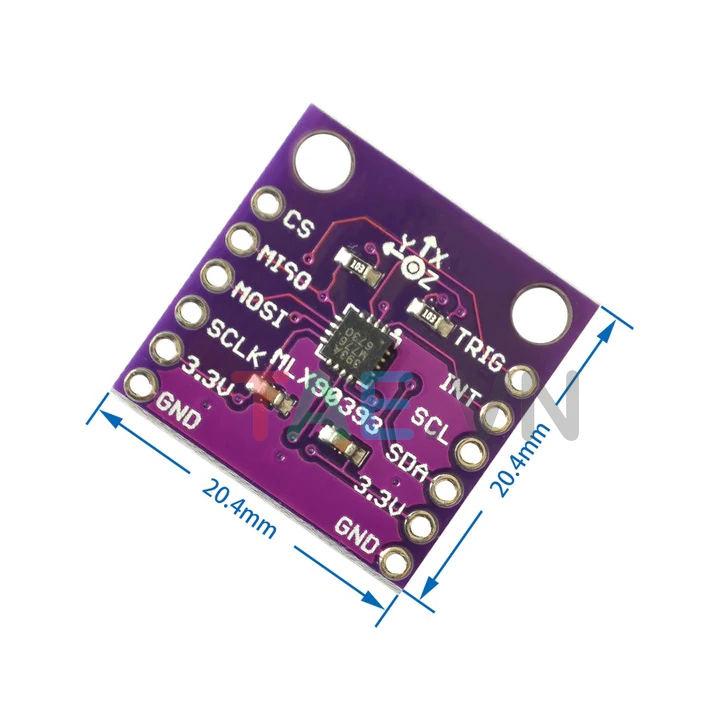
- Đo từ trường ở ba chiều (trục X, Y và Z)
- Độ phân giải đo lường từ trường: 16 bit
- Độ lỗi đo lường từ trường: ±0.2% FSS
- Tần số đo lường tối đa: 500Hz
- Giao tiếp: I2C, SPI
- Điều kiện hoạt động: từ -40°C đến +125°C
- Kích thước: 20.4mm x 20.4mm x 1mm
Code tham khảo cảm biến Hall MLX90393 với Arduino
|
#include <Wire.h> #define MLX90393_ADDRESS 0x0C void setup() { void loop() { |
- Giải thích code:
Đầu tiên, chúng ta khai báo địa chỉ của cảm biến Hall MLX90393 (0x0C) và khởi tạo kết nối I2C thông qua Wire.begin().
Trong hàm loop(), chúng ta bắt đầu giao tiếp với cảm biến bằng cách gửi một chuỗi byte đến địa chỉ của cảm biến. Chuỗi byte này được sử dụng để yêu cầu đo lường từ trường từ cảm biến.
Sau đó, chúng ta đợi 10ms để cho cảm biến hoàn thành đo lường và trả về kết quả.
Tiếp theo, chúng ta sử dụng Wire.requestFrom() để yêu cầu kết quả đo lường từ cảm biến.
Kết quả đo lường được lưu trữ trong 2 byte và chúng ta sử dụng phép dịch bit và phép OR để biến đổi chúng thành giá trị số nguyên.
Cuối cùng, chúng ta in kết quả đo lường lên Serial Monitor và đợi 100ms trước khi tiếp tục lặp lại quá trình đo lường.
Lưu ý rằng, để chạy được mã này, bạn cần đảm bảo rằng bạn đã kết nối cảm biến Hall MLX90393 đúng cách với Arduino và cấu hình đúng các chân I2C.
TAG
#MLX90393 #hall #sensors #I2C #SPI #IoT #automation #cam_bien_hall_MLX90393 #cam_bien #90393
Video tham khảo


Sản Phẩm Liên Quan

Cảm Biến Công Tắc Từ Reed

Cảm Biến Hiệu Ứng Hall
