-
 Thiết Bị STEM
Thiết Bị STEM
-
Sáng Tạo - Nghệ Thuật
-
Đồ Chơi - Công Nghệ
-
Mô Phỏng Nghề Nghiệp
-
Robotic Frames
-
Mạch Lập Trình
-
Module - Mạch Cảm Biến
- Chi tiết danh mục
-
Combo Cảm Biến
-
Cảm Biến Vân Tay
-
Cảm Biến Gyro Gia Tốc
-
Cảm Biến La bàn
-
Cảm Biến Áp Suất
-
Cảm Biến Độ Ẩm - Nhiệt Độ
-
Cảm Biến Nước - Mưa
-
Cảm Biến Ánh Sáng
-
Cảm Biến Âm Thanh
-
Cảm Biến Touch
-
Cảm Biến Trọng Lượng
- Cảm Biến Lưu Lượng
-
Cảm Biến Từ - Kim Loại
-
Cảm Biến Đếm - Encoder
-
Cảm Biến Vị Trí - Định Vị
-
Cảm Biến Khí - Môi Trường
-
Cảm Biến Điện Áp - Dòng Điện
-
Cảm Biến Chuyển Động - Rung
-
Cảm Biến Khoảng Cách - Vật Cản
-
Module - Mạch Điện Tử
- Chi tiết danh mục
- LCD Màn Hình Hiển Thị
- LED - Matrix Hiển Thị
- Đồng Hồ Đo - Hiển Thị
- Mạch Nguồn - Điều Chỉnh
- Mạch Relay - Đóng Ngắt
- Mạch Điều Khiển Động Cơ
- Mạch Nạp Dữ Liệu Chip
- Mạch Truyền - Nhận Tín Hiệu
- Mạch Chuyển Đổi Dữ Liệu
- Truyền Nhận - Âm Thanh
- Van Điện - Công Tắc Điện
-
Phím Bấm - Keypads
-
Mạch Đệm - Cách Ly Tín Hiệu
-
Mạch Khuếch Đại Tín Hiệu
-
Dụng Cụ Hàn Cell - Đóng Pin
-
Linh Kiện DIY - Theo Project
-
Thiết Bị - Nội Thất Maker Place
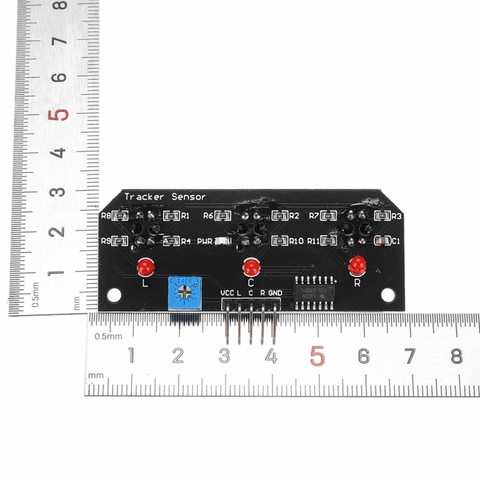
Module Dò Line TRCT5000 3 Chiều







Thông Tin Sản Phẩm
Mô tả sản phẩm
Module Dò Line TRCT5000 3 Chiều là một bộ phận cảm biến được sử dụng để phát hiện và theo dõi đường dẫn của robot hoặc các thiết bị tự động khác trên một bề mặt phẳng. Nó bao gồm một cặp cảm biến hồng ngoại, được thiết kế để phát hiện dấu vết đường dẫn, bao gồm cả đường thẳng và đường cong.
Mỗi cặp cảm biến được lắp đặt trên hai bên của robot, và sử dụng đèn LED hồng ngoại để phát tín hiệu và thu lại tín hiệu phản xạ từ bề mặt đường dẫn. Khi robot di chuyển trên đường dẫn, các cảm biến thu thập dữ liệu về đường dẫn và gửi tín hiệu đến bộ vi xử lý để xử lý và điều khiển chuyển động của robot.
Module Dò Line TRCT5000 3 Chiều là sử dụng để phát hiện chướng ngại vật, cho các giới hạn chuyển động trên cánh tay robot , sử dụng phát hiện ánh sáng hồng goại , khả năng chống nhiễu tốt,sử dụng cảm biến TRCT5000 hiệu ứng có thể điểu chỉnh hiệu suất ổn định.
Các ứng dụng của module dò line TRCT5000 3 chiều bao gồm:
- Robot theo dõi đường dẫn: Các robot tự động sử dụng module dò line để theo dõi đường dẫn và di chuyển trên đường dẫn một cách chính xác.
- Robot tránh vật cản: Khi được sử dụng cùng với các cảm biến siêu âm hoặc cảm biến khoảng cách, module dò line có thể giúp robot tránh vật cản và di chuyển an toàn trên đường dẫn.
- Robot hút bụi tự động: Các robot hút bụi tự động cũng sử dụng module dò line để theo dõi đường dẫn và di chuyển trên đường dẫn của căn phòng.
- Điều khiển động cơ: Module dò line cũng có thể được sử dụng để điều khiển động cơ trong các ứng dụng như xe đạp điện hoặc xe tay ga tự động, nơi đường dẫn được sử dụng để kiểm soát tốc độ và hướng di chuyển.

Thông số kỹ thuật
- Điện áp đầu vào : 5VDC
- Dòng tiêu thụ: < 20mA
- Khoảng cách phát hiện: 10mm
- Góc quét: 120°
- Độ phân giải: 0,1mm
- Tần số hoạt động: 1kHz
- Có chiết áp để điều chỉnh độ nhạy
- Có Đèn báo
- Kích thước :
Code tham khảo Module Dò Line TRCT5000 3 Chiều
|
#define LINE_LEFT A0 void setup() { void loop() { |
Trong ví dụ trên, chúng ta định nghĩa ba chân analog để kết nối với ba cặp cảm biến của Module dò line TRCT5000 3 chiều. Trong hàm loop(), chúng ta sử dụng hàm analogRead() để đọc giá trị đầu vào từ các cảm biến và hiển thị chúng trên Serial Monitor với tốc độ baud rate là 9600. Cuối cùng, chúng ta sử dụng hàm delay() để chờ một khoảng thời gian ngắn giữa các lần đọc.
TAG
#TCRT50003-WayLineDetectorModule #TCRT50003 #module #Module_Do_Line_TRCT5000_3_Chieu #do_duong #do _line_3_chieu
Video tham khảo sản phẩm tương tự

Sản Phẩm Liên Quan



Cảm Biến Hồng Ngoại Phát Hiện Vật Cản (Dò Line 4 Kênh)





Cảm Biến Siêu Âm Chống Nước AJ-SR04M

Cảm Biến Siêu Âm HC-SR04

Cảm Biến Siêu Âm SRF05

