-
 Thiết Bị STEM
Thiết Bị STEM
-
Sáng Tạo - Nghệ Thuật
-
Đồ Chơi - Công Nghệ
-
Mô Phỏng Nghề Nghiệp
-
Robotic Frames
-
Mạch Lập Trình
-
Module - Mạch Cảm Biến
- Chi tiết danh mục
-
Combo Cảm Biến
-
Cảm Biến Vân Tay
-
Cảm Biến Gyro Gia Tốc
-
Cảm Biến La bàn
-
Cảm Biến Áp Suất
-
Cảm Biến Độ Ẩm - Nhiệt Độ
-
Cảm Biến Nước - Mưa
-
Cảm Biến Ánh Sáng
-
Cảm Biến Âm Thanh
-
Cảm Biến Touch
-
Cảm Biến Trọng Lượng
- Cảm Biến Lưu Lượng
-
Cảm Biến Từ - Kim Loại
-
Cảm Biến Đếm - Encoder
-
Cảm Biến Vị Trí - Định Vị
-
Cảm Biến Khí - Môi Trường
-
Cảm Biến Điện Áp - Dòng Điện
-
Cảm Biến Chuyển Động - Rung
-
Cảm Biến Khoảng Cách - Vật Cản
-
Module - Mạch Điện Tử
- Chi tiết danh mục
- LCD Màn Hình Hiển Thị
- LED - Matrix Hiển Thị
- Đồng Hồ Đo - Hiển Thị
- Mạch Nguồn - Điều Chỉnh
- Mạch Relay - Đóng Ngắt
- Mạch Điều Khiển Động Cơ
- Mạch Nạp Dữ Liệu Chip
- Mạch Truyền - Nhận Tín Hiệu
- Mạch Chuyển Đổi Dữ Liệu
- Truyền Nhận - Âm Thanh
- Van Điện - Công Tắc Điện
-
Phím Bấm - Keypads
-
Mạch Đệm - Cách Ly Tín Hiệu
-
Mạch Khuếch Đại Tín Hiệu
-
Dụng Cụ Hàn Cell - Đóng Pin
-
Linh Kiện DIY - Theo Project
-
Thiết Bị - Nội Thất Maker Place
Mạch Điều Khiển Động Cơ L298 ( 2 Động Cơ DC )













Thông Tin Sản Phẩm
Mô Tả Sản Phẩm
Mạch Điều Khiển Động Cơ L298 giúp bạn có thể điều khiển tốc độ và chiều quay của động cơ DC một cách dễ dàng, ngoài ra module L298 còn điều khiển được 1 động cơ bước lưỡng cực. mạch cầu H l298 động cơ có điện áp từ 5V đến 35V.
Mạch Điều Khiển Động Cơ L298 có tích hợp một IC nguồn 7805 để tạo ra nguồn 5V để cung cấp cho các thiết bị khác.

Thông Số Kỹ thuật
- Driver: L298N tích hợp hai mạch cầu H.
-Điện áp điều khiển: +5 V ~ +35 V
- Dòng tối đa cho mỗi cầu H là: 2A
- Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
- Dòng của tín hiệu điều khiển: 0 ~ 36mA
- Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
- Nhiệt độ bảo quản: -25 ℃ ~ +130 ℃

Sơ Đồ Đấu Nối
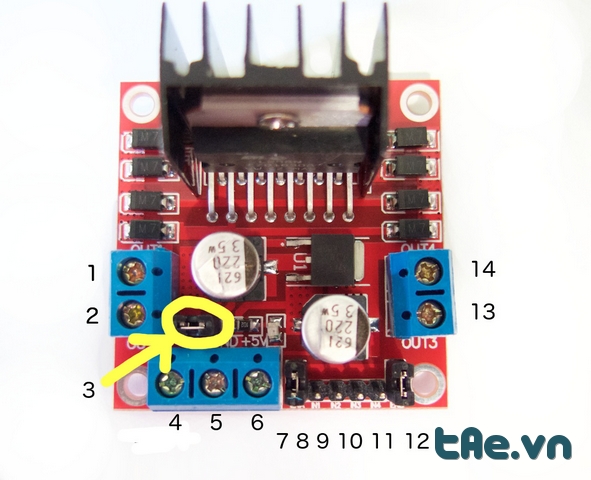
- DC motor 1 "+" hoặc stepper motor A+
- DC motor 1 "-" hoặc stepper motor A-
- 12V jumper - tháo jumper qra nếu sử dụng nguồn trên 12V. Jumper này dùng để cấp nguồn cho IC ổn áp tạo ra nguồn 5V nếu nguồn trên 12V sẽ làm cháy IC Nguồn
- cằm dây nguồn cung cấp điện áp cho motor vào đây từ 6V đến 35V.
- cắm chân GND của nguồn vào đây
- ngõ ra nguồn 5V, nếu jumper đầu vào không rút ra.
- Chân Enable của Motor 1, chân này dùng để cấp xung PWM cho motor nếu dùng VDK thì rút jumper ra và cắm chân PWM vào đây. Giữ nguyên khi dùng với động cơ bước
- IN1
- IN2
- IN3
- IN4
- Chân Enable của Motor 2, chân này dùng để cấp xung PWM cho motor nếu dùng VDK thì rút jumper ra và cắm chân PWM vào đây. Giữ nguyên khi dùng với động cơ bước
- DC motor 2 "+" hoặc stepper motor B+
- DC motor 2 "-" hoặc stepper motor B-
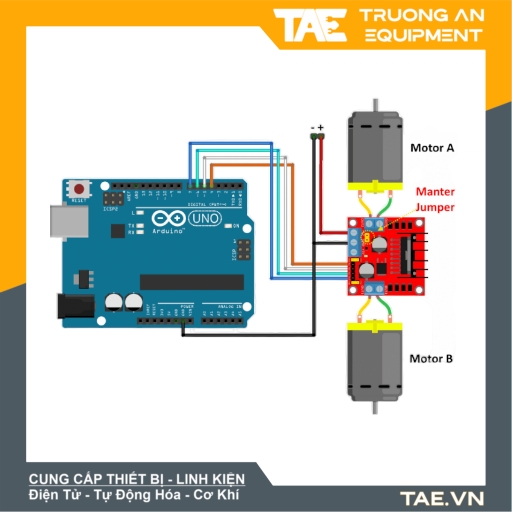
Code Mẫu Với Arduino
|
// Khai báo các chân điều khiển void setup() { void loop() { |
Trong ví dụ này, chúng ta sử dụng các chân điều khiển 8, 7, và 9 trên Arduino để điều khiển module L298N. Chân 9 được sử dụng để điều khiển tốc độ của động cơ bằng phương thức PWM. Các chân 8 và 7 được sử dụng để điều khiển chiều quay của động cơ. Với code này, động cơ sẽ quay theo chiều thuận kim đồng hồ trong 2 giây, sau đó dừng trong 2 giây, tiếp tục quay theo chiều ngược kim đồng hồ trong 2 giây và dừng lại trong 2 giây nữa, rồi lặp lại quá trình.
Video Hướng Dẫn
Tag
#dieu_khien_dong_co #mach_cau_h #L298 #dong_co_dc












